


The AMPERE ecosystem is demonstrated by developing and executing two real-world use cases very close to production from the automotive and the railway sectors.
Automotive use case: Intelligent Predictive Cruise Control (PCC)
Overview
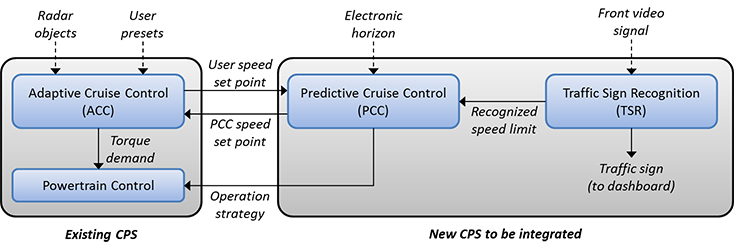
This use case, provided by AMPERE’s partner BOSCH, serves as an example of the increasingly autonomous decision-making capabilities of advanced automotive systems. The use case consists of four components composing different applications with different execution semantics:
- The already existing Adaptive Cruise Control (ACC) and the Powertrain Control subsystems, which implement classical real-time systems
- The new advanced functionalities for Predictive Cruise Control (PCC), which require data-intensive dynamic programming.
- The Traffic Sign Recognition (TSR) subsystem, which includes video processing and machine learning workloads.
Functionality
The PCC extends the scope of the ACC functionality by calculating the vehicle’s future velocity curve using data from the electronic horizon (topographical data like curvature, inclines, or speed limits), which provides information on the route ahead, extending well beyond the next bend. In combination with the PCC, the ACC functionality now not only automatically reduces the vehicle’s speed when it detects obstacles or slow-moving vehicles ahead, but also when approaching bends and reduced speed zones.
The deep learning TSR functionality (based on deep neural networks, DNNs) detects road signs and provides speed limits to the PCC, which reflect the current state of the road (e.g. considering variable speed zones or construction sites) that are not featured in the electronic horizon. Moreover, in cooperation with the Powertrain Control, the PCC improves fuel efficiency by configuring the driving strategy based on predictive data analytics and AI methods. The potential is particularly high in the case of hybrid vehicles, where fuel consumption can be reduced by up to 15%. That is, the engine management system can use the route preview to calculate how much energy the powertrain will need and control the dynamics of the internal combustion engine and/or electric motor according to the anticipated requirements. For instance, when the system identifies a segment of the route in which a hybrid vehicle will be able to recuperate more energy than it expends, it can engage the electric motor to discharge the battery before reaching this point.
Integration
The computational power and communication bandwidth required for complex systems-of-systems, such as the intelligent PCC, exceeds the capabilities of current compute nodes (mainly micro-controller Systems on Chip, SoCs) and is leading to the paradigm of so-called centralized E/E architectures that are based on a new class of computing nodes featuring powerful micro-processors and accelerators such as FPGAs and GPUs. One consequence of these centralized E/E architectures is that heterogeneous applications will be co-existing on the same HW platform, heterogeneous not only in their model of computation (ranging from classical periodic control over event-based planning to stream-based perception applications) but also in their criticality level in terms of real-time and safety requirements. Particularly, the four components of this use case have different criticality levels, known as ASIL (Automotive Safety Integrity levels) in automotive nomenclature, that need to be isolated from each other such that there is no unintended interference between them.
Ultimately, the burden of integration is shifted from the network to the ECU level and in this regard typically from the vehicle manufacturer to the supplier of the centralized vehicle computer. Catering for the various requirements of these applications causes new integration challenges that will be considered by this use case. Moreover, with the objective of demonstrating the performance capabilities of the AMPERE ecosystem for the above mentioned integration challenges, additional (synthetic) applications will be integrated on the same computing platform. These applications resemble from a performance point of view typical workloads in autonomous driving. This will allow to further stress the computing resources and better evaluate the AMPERE ecosystem.
Key performance indicators of the AMPERE ecosystem
- Satisfy the high computation demands of PCC algorithms while guaranteeing the safety properties of the powertrain control and ACC functionalities.
- Maintain the functional properties of the PCC when integrating further synthetic applications, to demonstrate the compositional integration capabilities of the AMPERE ecosystem.
- Providing a reduced development effort for integrating new functionalities in an existing system, by coupling the AMPERE ecosystem with existing automotive standards and tools.
Railway use case: Obstacle Detection and Avoidance System (O.D.A.S.)
Overview
This use case, provided by AMPERE’s partner THALES Italy, will provide a real demonstrator on the Florence Tramway Network railway industry, including LRT (Light Rail Transit) or tramway systems. Concretely, the use case will implement an Obstacle Detection and Avoidance System (O.D.A.S.) supporting the tram driver, improving the level of safety of the Florence LRT transportation system. The use case consists of two main subsystems:
- The Sensor Data Fusion (SDF).
- The AI Analytics (AI) component.
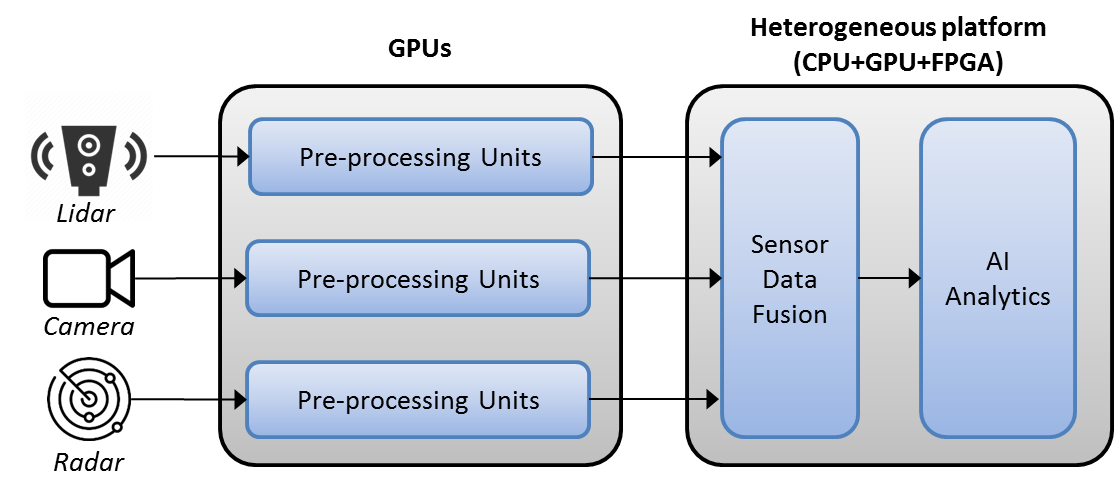
Block diagram of the O.D.A.S. use-case
Functioning
The SDF component will be in charge of collecting a large mass of raw data from the multiple advanced sensors installed in tram vehicles, i.e., optical and thermal cameras, radars, and LiDARs (light detection and ranging). Cameras are an effective tool for classifying objects (rails, signs vehicles, people...) through deep learning technologies; LiDAR and radar are good at estimating the position of objects around the vehicle. Each of these sensors has advantages and disadvantages depending on the operational scenarios, environmental and lighting conditions. For instance, backscattering from snowflakes or water droplets are sources of unwanted detections in automotive LiDARs, and cameras show limited performances in adverse weather conditions such as fog or rain.
Many of the previous constraints can be minimized using specific sensor techniques which, on the other hand, increase the sensor cost. Using sensor data-fusion machinery for having a common homographic view of the objects will increase the performance of the sensor system keeping the cost in a range suitable to the application target. The AI component will incorporate machine learning (e.g., Support Vector Machines, SVM) and deep learning (e.g., Convolutional Neural Networks, CNN, and Recurrent Neural Networks, RNN) algorithms to identify and track objects along the tramway infrastructure and extract knowledge that will be displayed to the tram driver.
Integration
The two components will be distributed and executed in a Commercial Off-The-Shelf (COTS) parallel and heterogeneous platform installed on-board tram vehicles, featuring multi-core SoC with FPGAs, GPUs and dedicated AI accelerators such as TPUs, capable of accelerating large matrix operations and perform mixed precision matrix multiply and accumulate calculations in a single operation. Moreover, the platform will host multiple standard hardware interfaces to ease the integration of the system into a wide range of operation conditions.
Finally, the constrained environment in which the computationally intensive functionalities will execute, imposes the need of using energy efficiency platforms with power envelopes lower than 30W. The use case will be verified in a real transportation environment of the Florence tramway network. To do so, a set of tram vehicles operating on Florence tramway lines will be equipped with sensors and related processing devices in order to demonstrate the performance capabilities and the fulfilment of non-functional requirements of the AMPERE ecosystem.
As a result, O.D.A.S. will implement functionalities with different criticality level in terms of functional safety and strict time constraints due to the real operation conditions with tram vehicles moving in an urban environment with traffic mixed with cars and pedestrians.
Key performance indicators of the AMPERE ecosystem
- Reduce the development and integration costs of the ADAS functional critical software modules by employing the AMPERE ecosystem starting from the system design phase.
- Improve the object detection capability and reduce the false alarms rate in critical environmental conditions (fog, rain, at night) by combining AMPERE with existing on-board systems.
- Reduce the energy needs of the ADAS component while retaining functional safety targets according to the standards.